课程7:倒车报警器
主题引入
这节课我们要认识一种新的传感器,这是一种在日常生活中经常用到的传感器。
师生互动提问:大家有没有用过商场内的自动感应水龙头?猜一猜是什么原理?让我们看看红外线传感器有什么实际用途:日常生活中,红外线在遥控器上、感应器上和医疗保健上都有广泛的应用。今天我们要利用它能感应物体距离的特性,做一个倒车报警器。
主题分析
1. 师生互动提问:现实中的倒车报警器是怎么样的?起到什么作用?
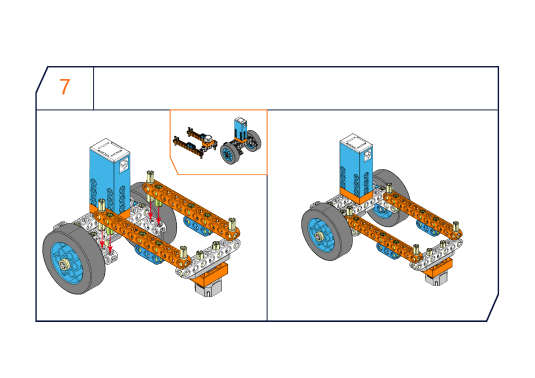
2. 如果要实现在离墙一定距离的时候就让车制动,红外线传感器应该安装在车的什么位置?
3. 我们倒车时需要提醒附件的人群和车辆,那我们应该怎么编写程序使车发出声音?
动手实践
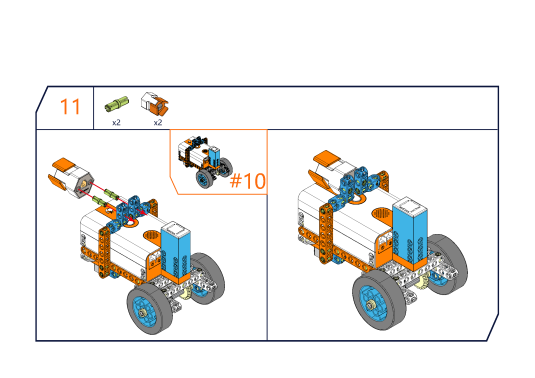
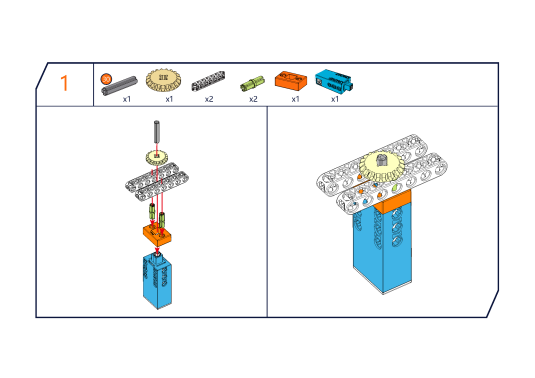
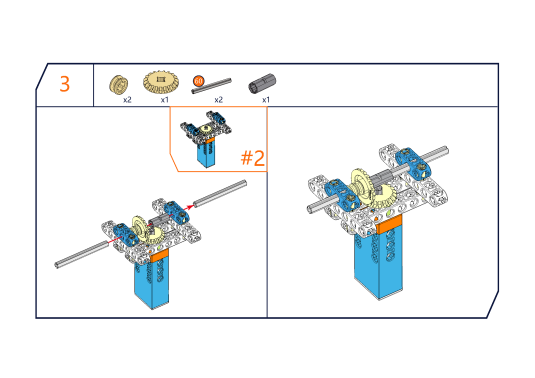
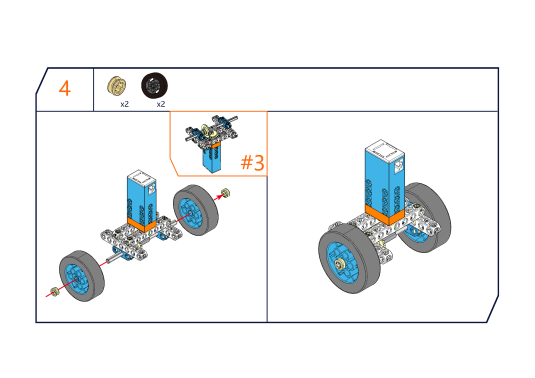
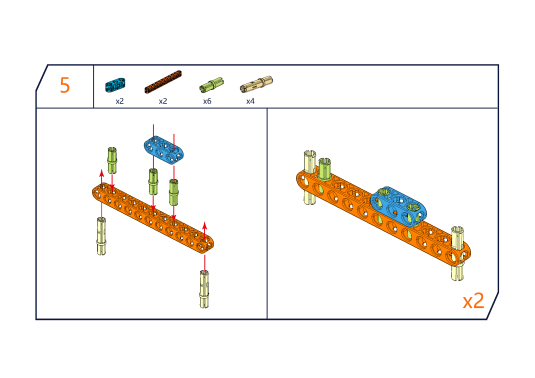
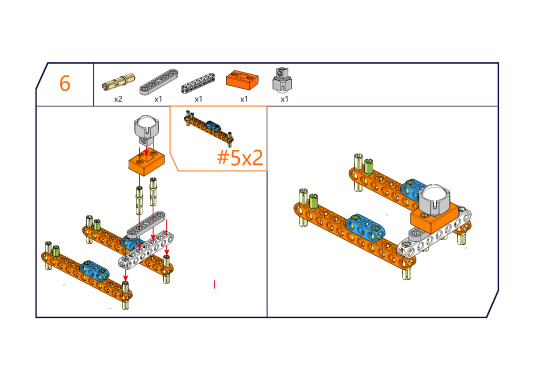
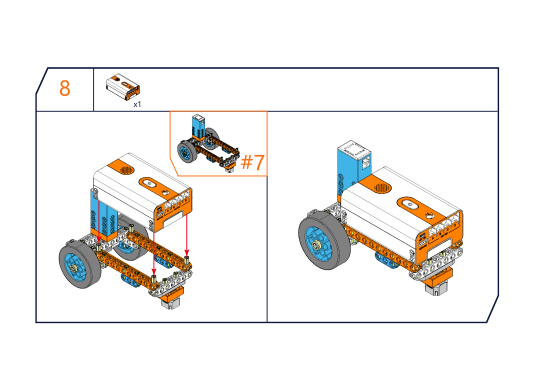
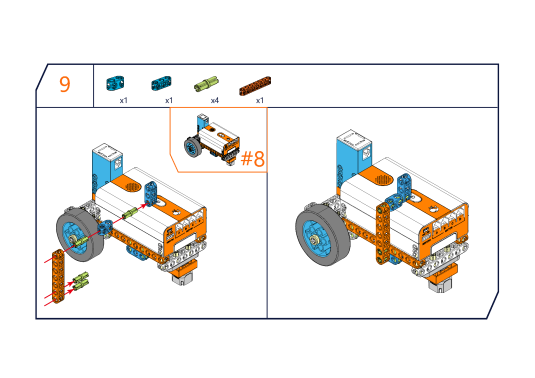
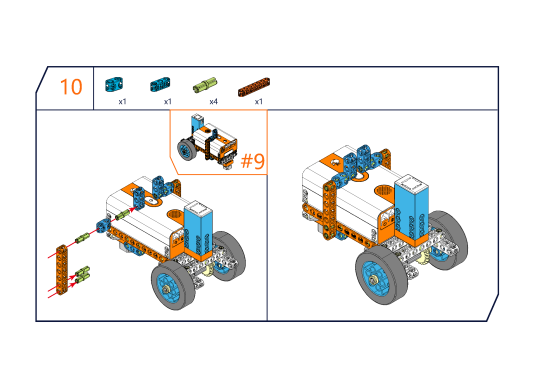
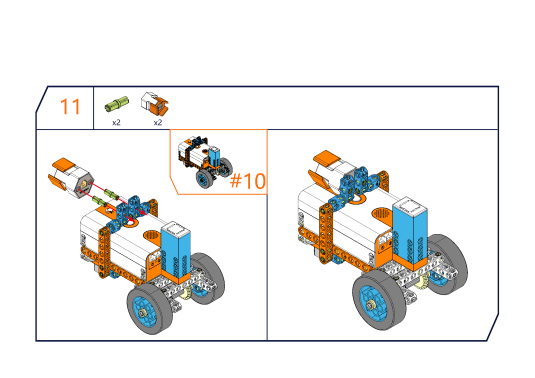
1. 搭建倒车报警器。
2. 介绍红外测距传感器:我们的红外测距传感器的测量范围是600-3000,数值越大,说明红外测距传感器与前方物体的距离越大。

编程实现
编写倒车报警器程序,使小车在倒车过程中持续发出警报声,直至倒车临界点停车并发出刹车声表示倒车完成。
分析:
①确定小车行进的方向,红外测距传感器面向的一面是车的尾部,以此确定马达是正转还是反转。还是附属
②本程序建议用“循环直到”语句编写,示例程序见下图。
③学生自行调试数值,以达到他们想要的倒车效果。
扩展任务:高速堵车模拟
任务要求:多辆装有红外测距传感器的小车前后排列,编写程序使每辆车始终紧跟前车并保持安全距离。
分析:所有车辆紧跟前车意味着一旦距离大于预定数值,小车就要前进,小车处于一个持续判断传感器数值的状态,所以本程序建议使用“重复执行”+“如果……否则”语句的组合来完成。
知识点检验
选择题:
1、倒车报警器依靠什么传感器来探测距离?( )
A 触碰开关传感器 B红外测距传感器
2、红外测距传感器的测量范围大致是( )
A.0~100 B.0~2000 C.600~3000 D.200~2000
成果展示
仅完成基础目标情况:请学生向同学们展示自己的倒车报警系统。
完成进阶任务目标情况:集体学生进行模拟堵车游戏,可以请一名学生做交警指挥车辆的行动或随机抽走车辆。
回顾红外测距传感器的应用原理,总结红外线传感器模块的编程方法。
 收藏人智科技
收藏人智科技