课程8:巡线实践
主题引入
同学们我们上次课程完成了一辆可以在各个直线路口停的巡线机器人,但是现实中的巡线机器人需要巡的路很可能会有很多分岔路,让机器人可以根据需求,从相同的起点,走向不同的终点。那么我们就需要让我们的机器人在路口进行转弯来进入不用的岔路。
主题分析
现在请同学们思考一下,我们的小车刚刚到达路口,如果它在这个路口需要左转,那么我们需要给他下达怎样的指令,直接左转可以吗?为什么?
答案:当小车灰度刚刚检测到路口时,我们不能直接命令它转弯。因为为了保证小车行驶的稳定性,我们一般使用原地转的方式保证小车的中心不变,在这样的前提下,我们就需要小车先前进到中心点在路口,才能进行左转。
动手实践
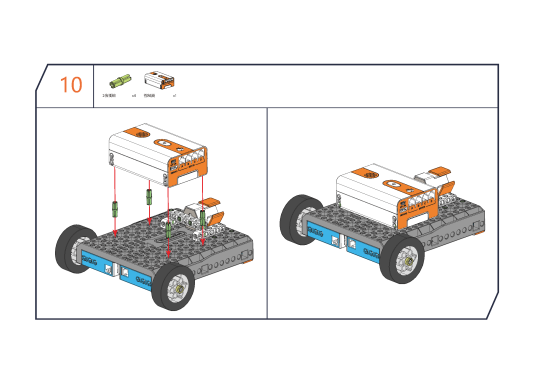
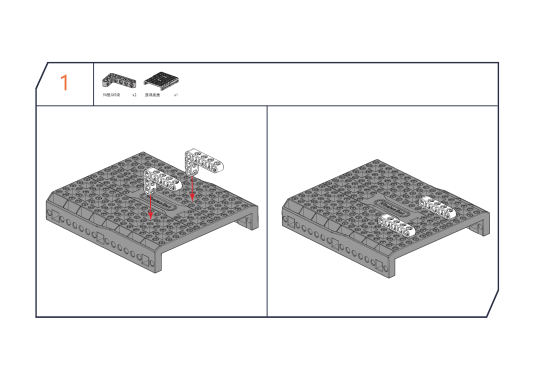
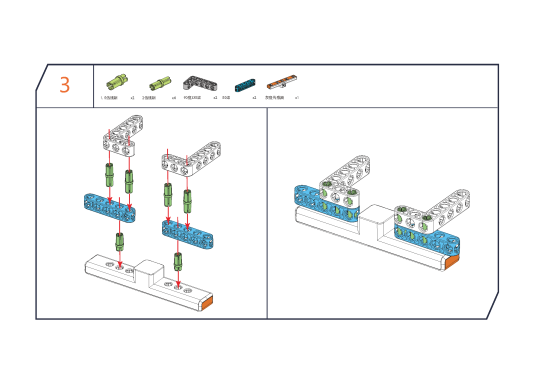
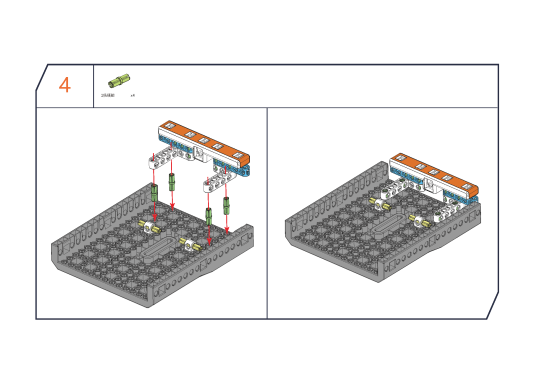
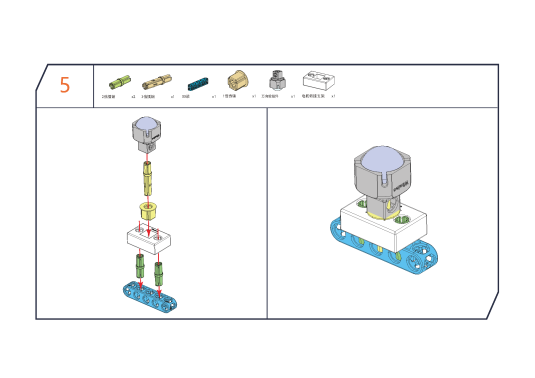
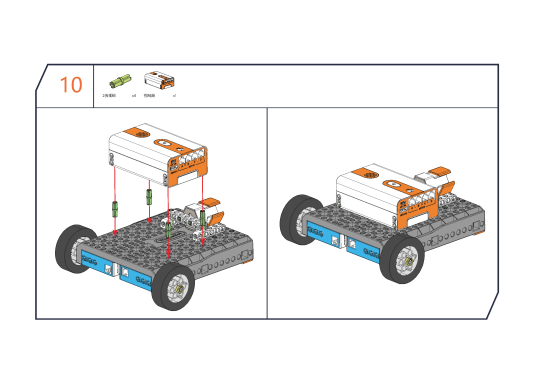
请学生搭建五灰度机器人。





编程指导
1.请学生先编写程序完成直线多路口的巡线任务,使机器人停在需要转弯的路口之前。
2.讲解转弯模块的使用:在转弯模块前的路口巡线中,必须设置冲过路口时间,这个时间需要设定为小车前进时从光感看到路口到小车中心到达路口的时间,为了使原地转弯后小车还可以巡到路口。转弯模块的原理是,使用设定好的左右马达速度进行转弯,直到中间3个光感的某一个看到黑线停。这里的某一个光感是需要设定的,在转弯语句中的左侧、中间、右侧分别是指4、3、2号通道光感看到黑线停止转弯。
3.讲解启动电机模块的使用:启动电机与转弯模块大致相似,让小车以设定好的左右马达速度进行转弯。但启动电机相比转弯模块有更多的控制手段,如时间,距离,并且可以设定5个通道的传感器触发。
4.请学生分别使用转弯模块和启动电机模块编写程序使小车到达路口后左转弯,进入左侧路口继续巡线。
知识点检验
判断题:
使用转弯模块控制小车左转时,停止的位置是中间的话,是指1号通道看到黑线。( )
选择题:
使用启动电机模块转弯时,想让小车停止的位置在中间的话,应选择( )号通道判断。
A.1 B.2 C.3 D.4 E.5
课后小结
总结巡线模块库中转弯模块和启动电机模块的使用方法。强调巡线模块库的编写逻辑。巡线路口和巡线计时的使用。
师生问答:
转弯模块和启动电机模块有何不同?哪一种更好?
 收藏人智科技
收藏人智科技